GJK算法:两个凸集的碰撞测试
GJK算法用于判断两个凸集是否相交,其中GJK是三个提出者的姓名首字母。为了便于理解(偷懒),下面的内容都只在二维平面内讨论。
回顾凸集
可能有很多小伙伴忘了什么是凸集。凸集的定义有很多种,最常用的一种是在集合中任取两点,连接这两点的线段一定在此集合内。很多常见的形状,例如三角形、矩形、圆、椭圆,都是凸集。
对于两个凸集A, B, 从集合A, B中分别任取一点a, b, 所有可能的a+b构成的集合称为A与B的闵可夫斯基和,记作A+B. A+B也是一个凸集,这一点用定义很容易证明。那么A+B大概长什么样子呢?我有一个不太成熟的想法:假设在原点有一支铅笔,现在用一根铁棒将铅笔与集合B连接,然后用铅笔将集合A涂一遍,那么在此过程中B扫过的区域就是集合A+B了。
类似于加法的定义,我们可以定义A与B的闵可夫斯基差A-B: 从A, B中分别任取一点a, b, 所有可能的a-b构成的集合便是A-B. A-B也是个凸集,因为集合-B是B中所有点的坐标取反,相当于相对于原点做了个对称变换,自身的形态并没有改变,只是在空间所处的位置发生了变化,从而-B也是个凸集,因此A-B = A + (-B), 两个凸集的和当然是凸集。
好了,到这里可以简单介绍下GJK算法的思想了:对于两个凸集A, B,想一想,如果A, B相交,那么必然有某个点同时包含在A与B中,从而凸集A-B必然包含原点;反之,如果A, B不相交,那么A-B必然不包含原点。因此,GJK算法的本质就是判断原点是否包含在A-B中。当然,GJK算法不会直接计算出A-B, 因为这样的操作在实际中不具有可操作性;对于我们讨论的二维平面,GJK算法会在A-B内找一个三角形,并在迭代过程中不断更新三角形,让这个三角形不断接近原点。为了高效实现这个目的,需要为凸集定义一个support方法。
这里可以找到上述内容的一个动画演示。
凸集的support方法
support方法其实很简单:这个方法接受一个二维向量direction作为输入,返回凸集在这个方向上最远的点。接口示意如下:
class ConvexSet:
def support(direction: Vector2d) -> Vector2d:
...例如,在下图中,圆在方向d1上最远的点是图中标红的点,矩形在方向d2上最远的点是图中标绿的点。如何找一个凸集沿着方向d 最远的点呢?这里,我又有一个不成熟的想法:作一条与d 垂直的直线l,然后沿着d 移动,直到一个极限的状态:如果沿着d 再移动一点点,凸集将会与直线l 没有任何交点;此时凸集与直线l 的交点就是沿着方向d 最远的点。

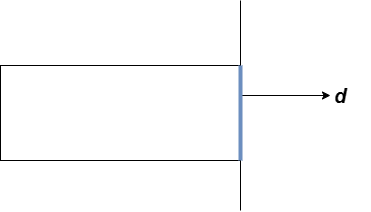
当然,有些凸集沿着某个方向的最远点可能不止一个,例如下图所示的矩形,整条蓝色边上的点都是沿着方向d 最远的点,这时我们任取一个就好。
既然说到这里,就顺便说说support操作是用来做什么的,这与凸集的另一个性质相关。对于这里讨论的二维平面来说,这个性质说的是,对于凸集边界上的任意一点s,都存在过s 的一条直线,使得整个凸集都在这条直线的同一侧。这里就不证了,有兴趣的朋友可以搜索“支撑超平面”。
给定方向d, support方法找到凸集沿着此方向最远的一个点s(不难看出,s 在凸集的边界上),此时过点s 且与方向d 垂直的直线就可以将整个凸集划分到直线的一侧(可以看看上面的示意图);如果此时原点在直线的另一侧,就说明原点必然不包含在凸集中。
GJK算法
假设输入的两个凸集为A和B, GJK算法的描述如下:
- 随机选择一个初始方向d.
- 计算A沿着方向d 最远的点pa 以及B沿着方向-d (注意,这里是-d )最远的点pb.令p = pa - pb .
- 令S={ p }, 更新方向d =-p.
- 计算A沿着方向d 最远的点pa 以及B沿着方向-d 最远的点pb ,令p = pa - pb.
- 如果p 与d 的点乘小于0, 则A, B不相交, 返回
false. - 否则, 将p 添加到集合S中.
- 如果S包含原点, 则A, B相交, 返回
true. - 否则,从S中选择距离原点最近的一条边, 更新方向d =这条边指向原点的方向,并跳转到第4步.
二维平面的一个点既可以看作是一个点,又可以看作是原点指向这一点的向量。因此,上述中出现的 -p 实际上指的是 p 指向原点的向量。
GJK算法的解读
前面说过,给定凸集A, B, GJK算法就是判断凸集A-B是否包含原点,只是它没有显式计算出A-B. 下面就来说明GJK算法的每一步都做了些什么。
我们没有必要知道A-B长什么样子,只要知道它是个凸集就够了。为了说明,可以想象下A-B的样子,比如说,A-B可能长成下面这样:
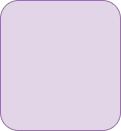
注意到GJK算法的一个关键操作:对于方向d, 计算p = A.support(d) - B.supoort(-d). 此时p 必然是A-B沿着方向d 最远的一个点。为什么?想一想,A.support(d)是A沿着方向d 最远的一个点,而B.support(d)是B沿着方向-d 最远的一个点,考虑集合A-B的定义,还能在方向d 上找到一个更远的点吗?
例1:A与B不相交
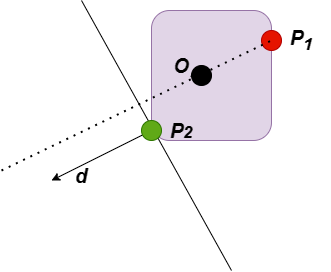
GJK算法的第一步,随机选择一个方向,例如(1, 0), 然后计算出A.support((1, 0)) - B.supoort((-1, 0))(即凸集A-B中沿着(1, 0)最远的一个点,下图中标红的点,记作P1)。下一步,将标红的点加入点集S, 并更新方向d 为标红的点指向原点(图中标黑的点)。
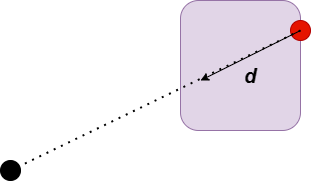
下一步,计算A.support(d) - B.supoort(-d), 这个点位于下图中标绿的点,我们将这个点记作P2. 可以看到,此时向量OP2 与d 的夹角大于90°,因此它们的点乘小于0. 从而说明原点O不可能在A-B中,从而可以判断A与B不相交。
例2:A与B相交
这种情况下,原点O在A-B的内部,前面的步骤同上。不过,此时向量OP2 与d 的点乘大于0, 如下图所示。
下一步,将P2 加入点集S. 此时S中只有两个点,直线P1P2 显然不包含原点O. 下一步更新d为P1P2 指向O的方向,如下图所示:

更新d 之后,就开始了下一次的循环,计算A.support(d) - B.supoort(-d), 这个点位于下图中标蓝的点,记作P3. 如下图所示:
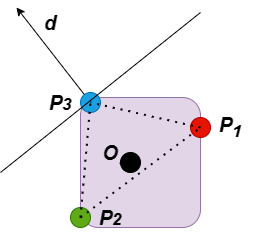
此时向量OP3 与d 的点乘仍然大于0. 下一步,P1P2P3 构成的三角形已经包含原点O. 从而说明A-B包含原点O, 即A, B相交。
例3:A与B相交
如果在例2中,P1P2P3 构成的三角形并不包含原点O. 这时就需要找到此三角形中与原点O 最近的那条边,更新点集S为这条边的两个顶点,接下来的步骤和例2中的相同:更新方向d 为这条边指向原点的方向,然后继续循环下去。(用上面的图不太好画这种情况的例子,我就不画了,改用口头叙述)
小结
可以看到,GJK算法所做的,就是用一个三角形来近似两个凸集A,B的差A-B, 然后更新这个三角形使之不断接近原点。 GJK算法的泛化性也很强,如果对于不同类型的物体,每两个类型都要写一个碰撞检测算法,比如说圆与矩形、矩形与正六边形,那得写多少?!反而,GJK算法只要求物体是凸的,而且只要提供support方法就好。而且GJK算法的收敛速度看起来也很快,虽然我还不能从理论的角度想清楚这一点,哪位朋友想清楚了可以告诉我一声😀。
碎碎念:算法看起来不难,用Python实现了下,我的感受是一步一个坑。很多细节都需要考虑,例如如何判断原点是否在三角形内部、如何找到距离原点最近的边等等。事实上,最后出现bug的地方在二维向量类的实现,有个地方写错了调试了好久,下次这种就用现成的吧。还有,这种博客好难写,写了好久还是感觉写得不太清楚,不过拖了一周终于有了个初稿,有机会再改改吧. 😎