三维空间中的刚体运动、MPU6050、DMP姿态解算、卡尔曼滤波
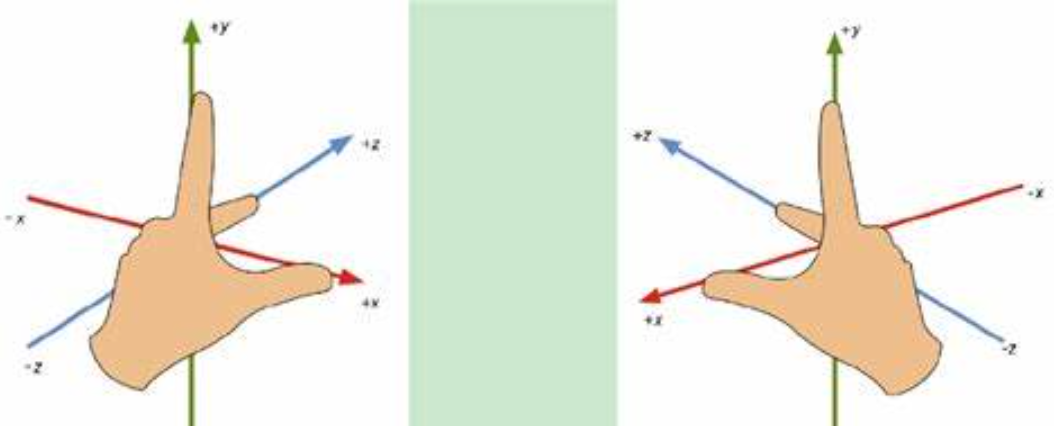
坐标系
空间中三个正交的轴组成,构成线性空间的一组基($𝒆_1,𝒆_2,𝒆_3$)
左右手系
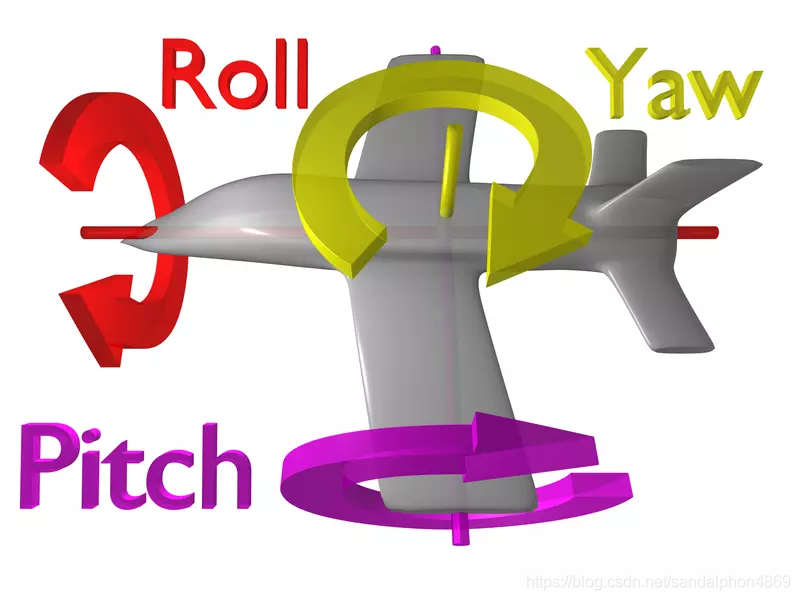
欧拉角(Euler Angles)
将空间中的旋转分解到三次不同轴(定轴或动轴)上的转动
常见定义
yaw(偏航角):绕y轴旋转
pitch(俯仰角):绕x轴旋转
roll(横滚角):绕z轴旋转
 (右手系)
(右手系)
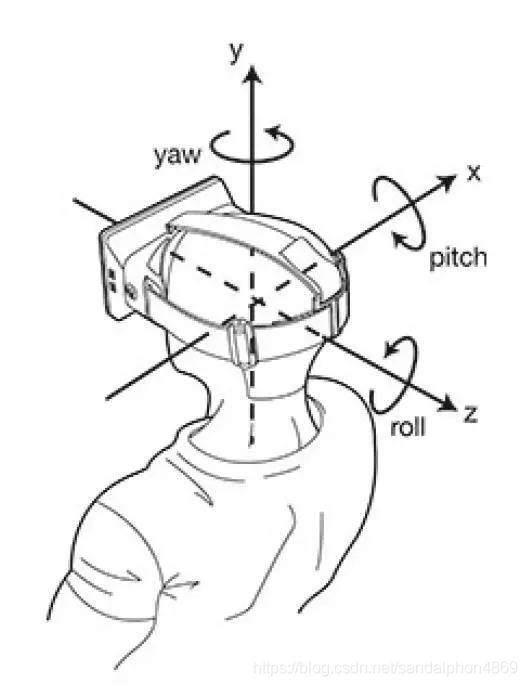
位姿其实就是位置和姿态的合称,位置也就是在三维空间中的坐标(x,y,z),而姿态是在三维空间中的旋转(r,p,y),因此位姿总共包含6个自由度。
左右歪头是滚转角roll,上下点头是俯仰角pitch,左右摇头则是偏航角yaw。
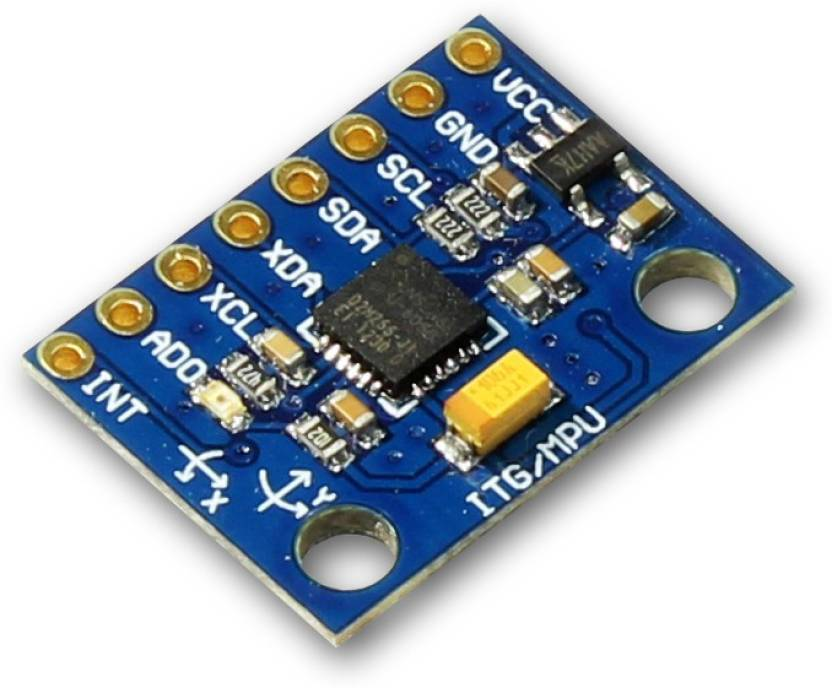
MPU6050
参考:
1.机器人的坐标体系RPY:roll轴、pitch轴和yaw轴_yaw轴pitch轴roll轴_sandalphon4869的博客-CSDN博客
2.【视觉SLAM】视觉SLAM:一直在入门,从未到精通 - 知乎 (zhihu.com)
3.STM32 实现 MPU6050 数据读取与倾角检测 - 知乎 (zhihu.com)
4.超详细陀螺仪MPU6050模块输出姿态角(有完整版源码)_Wu__La的博客-CSDN博客
5.MPU6050-哔哩哔哩_Bilibili
6.MPU6050姿态融合解算(DMP)爱写代码的猫的博客-CSDN博客
7.Dynamic Movement Primitives介绍及Python实现与UR5机械臂仿真 - 知乎 (zhihu.com)
8.MPU6050姿态解算方式1-DMP - 知乎 (zhihu.com)
9.用人话告诉你 mpu6050 电子陀螺芯片怎么使用_哔哩哔哩_bilibili