Issac_GYM对Go2机器人的仿真心得
override 覆盖
torques 扭矩
1 args()参数信息等
cd /home/yyds/桌面/Gym2/legged_robot_competition-master/legged_gym/legged_gym/utils/helpers.py
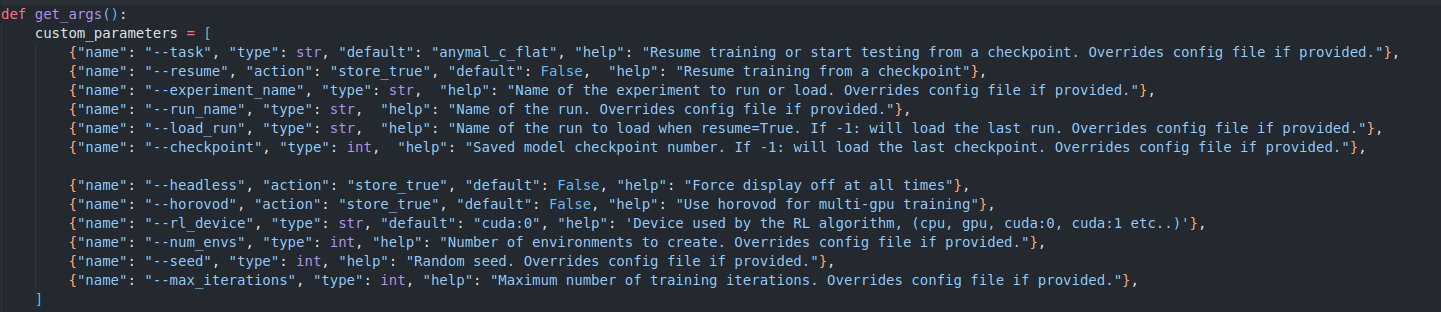
这里对 train等参数的调用情况进行了说明
比如:
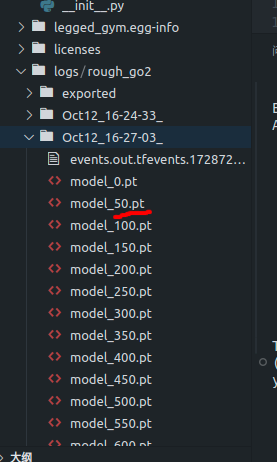
python play.py --task=go2 --num_envs=64 --checkpoint=50 --load_run=/home/yyds/桌面/Gym2/legged_robot_competition-master/legged_gym/logs/rough_go2/Oct12_16-27-03_
其中check_point 保存的一组训练参数
check_point = 50
num_envs = 64
同时进行64个环境一起训练