ROS学习-启动服务端错误debug
ros2 run examples_rclpy_minimal_service service输入这个命令用于运行服务节点,这个服务的功能是将两个数字相加,给定a,b两个数,返回sum也就是ab之和。
报错:
2024-04-27 13:11:39.105 [RTPS_TRANSPORT_SHM Error]
Failed init_port fastrtps_port7412:open_and_lock_file failed ->
Function open_port_internal
解决方法:
方法一:
可能是找不到和这个服务通信的数据类型。采用下面的命令安装,重新运行:
sudo apt install ros-foxy-controller-manager*
方法二:
依据文心一言
尝试重启,解决节点关闭的问题:
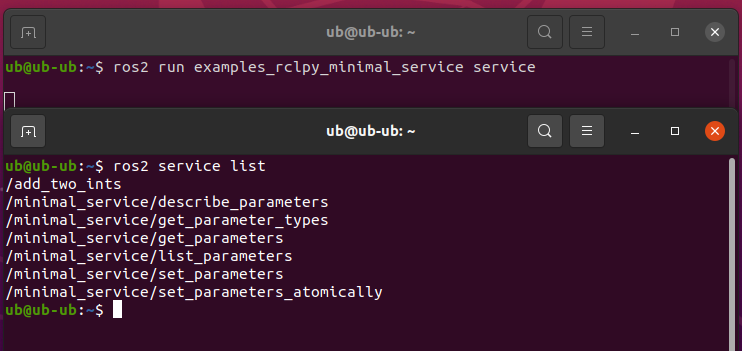
成功!