该模型在额定以下采用MTPA控制,速度环输出给定电流,然后代入MTPA得到dq电流,电压反馈环输出超前角进行弱
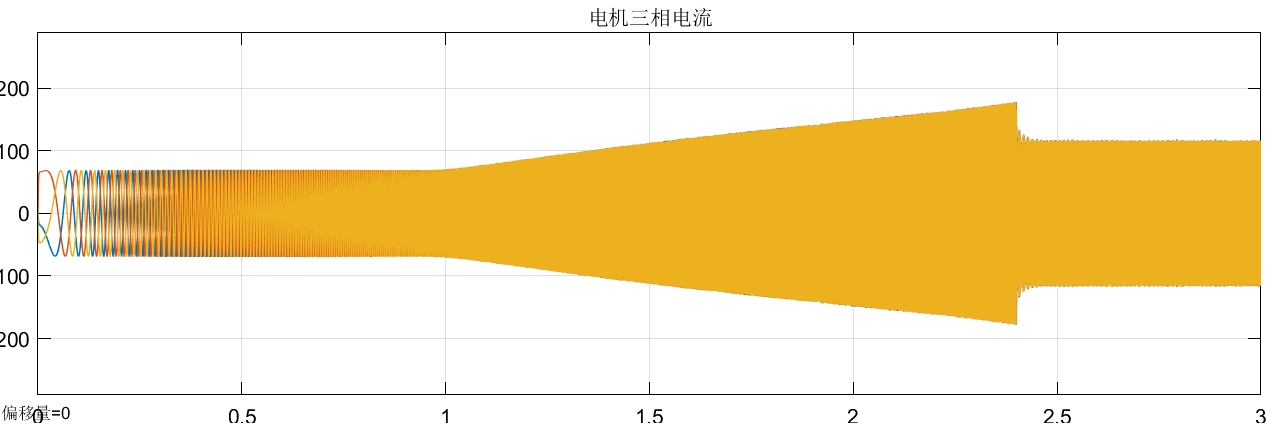
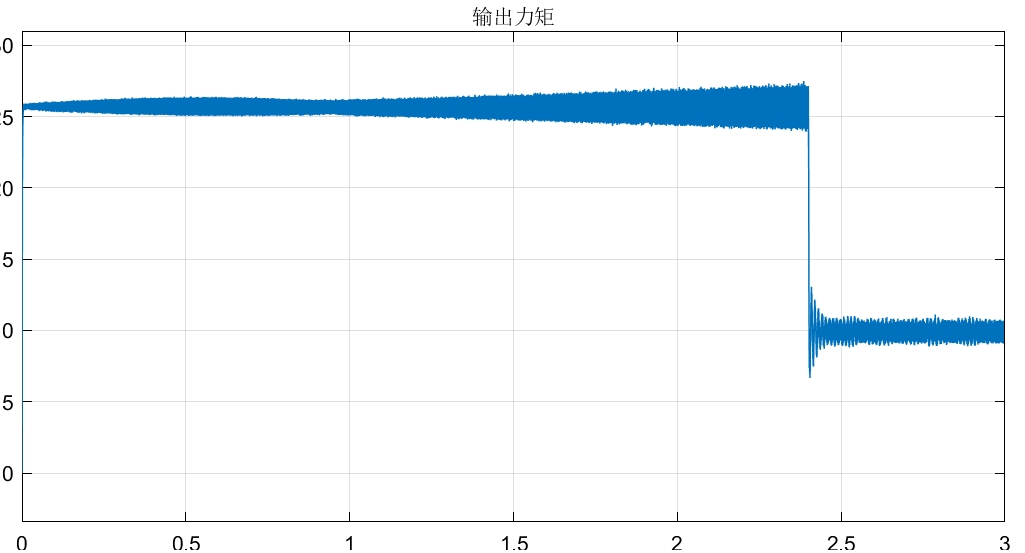
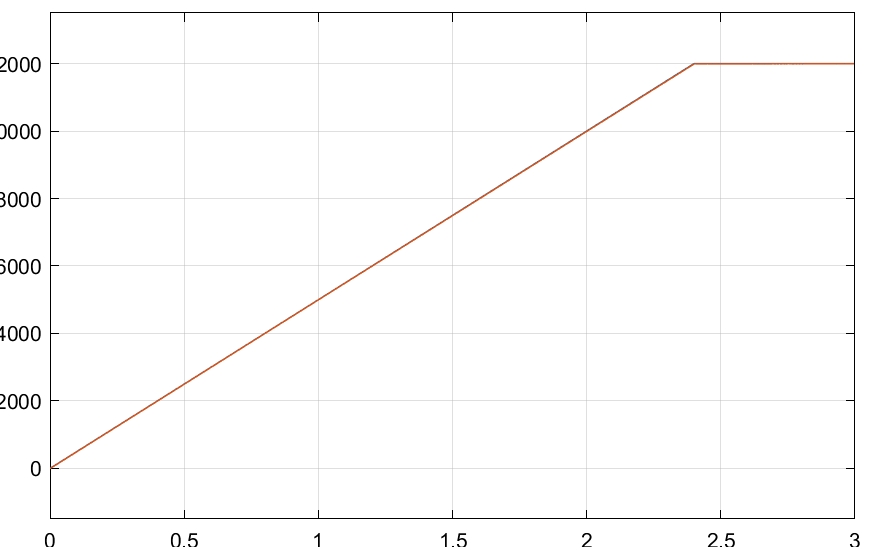
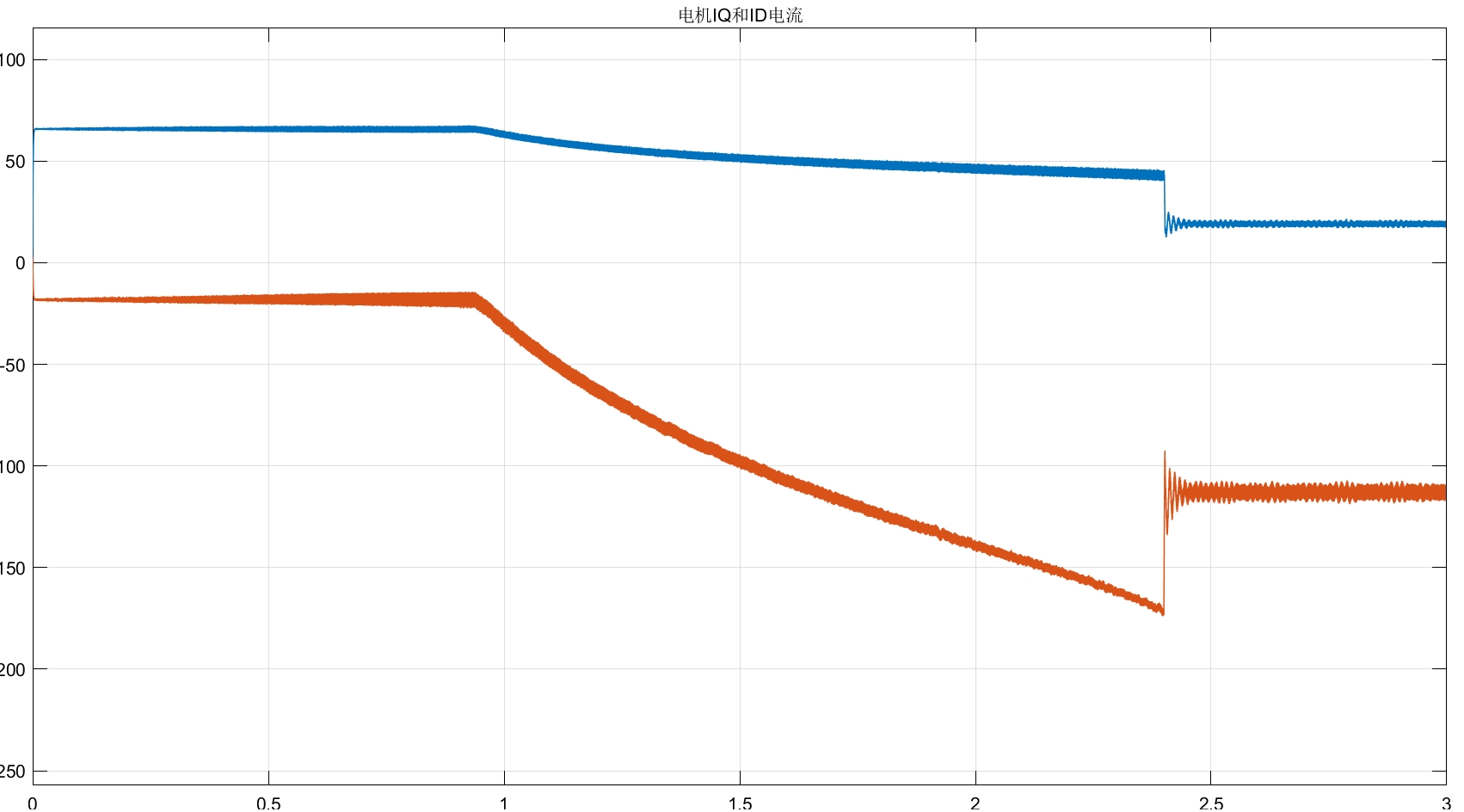
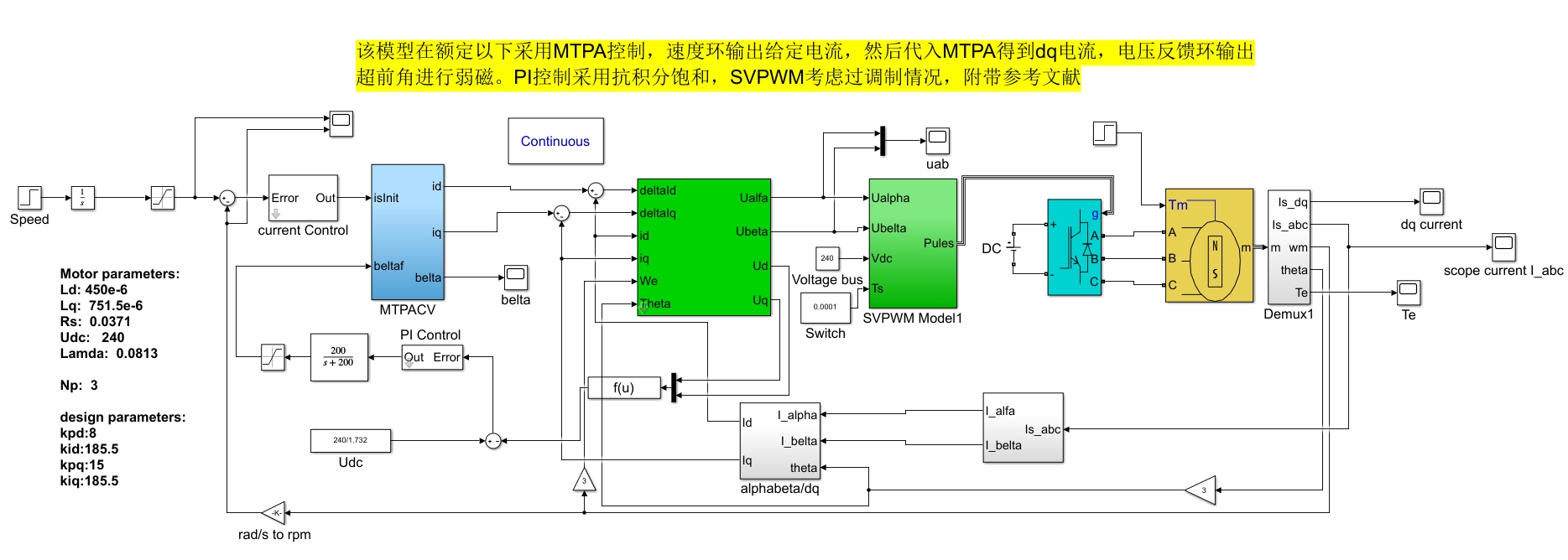
该模型在额定以下采用MTPA控制,速度环输出给定电流,然后代入MTPA得到dq电流,电压反馈环输出超前角进行弱磁。
PI控制采用抗积分饱和,SVPWM考虑过调制情况,附带参考文献
ID:5858675014109790

该模型在额定以下采用MTPA控制,速度环输出给定电流,然后代入MTPA得到dq电流,电压反馈环输出超前角进行弱磁。
PI控制采用抗积分饱和,SVPWM考虑过调制情况,附带参考文献
ID:5858675014109790