该模型在旋转坐标系下采样旋转高频注入的方法进行低速时的无传感器器控制,对静止坐标系下的电流进行同轴系
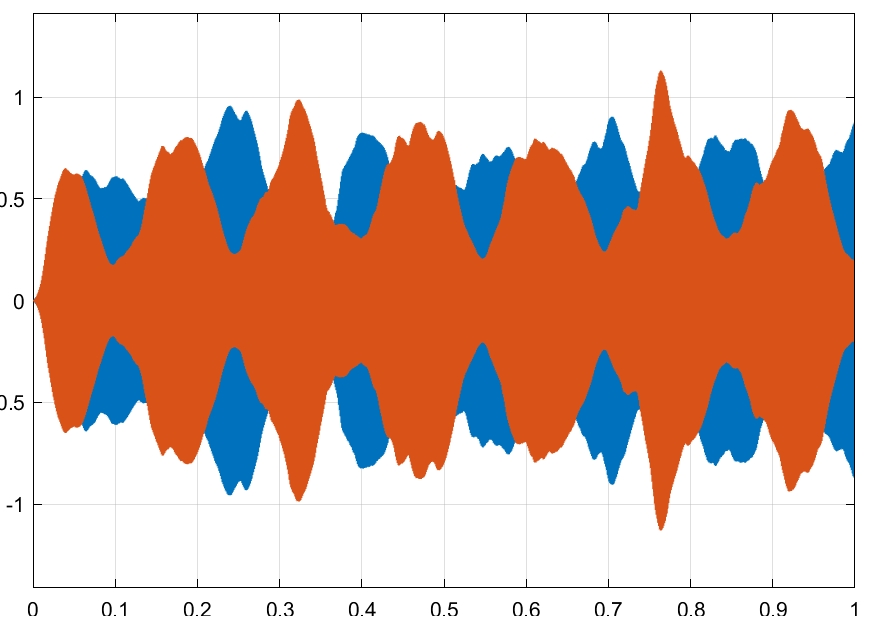
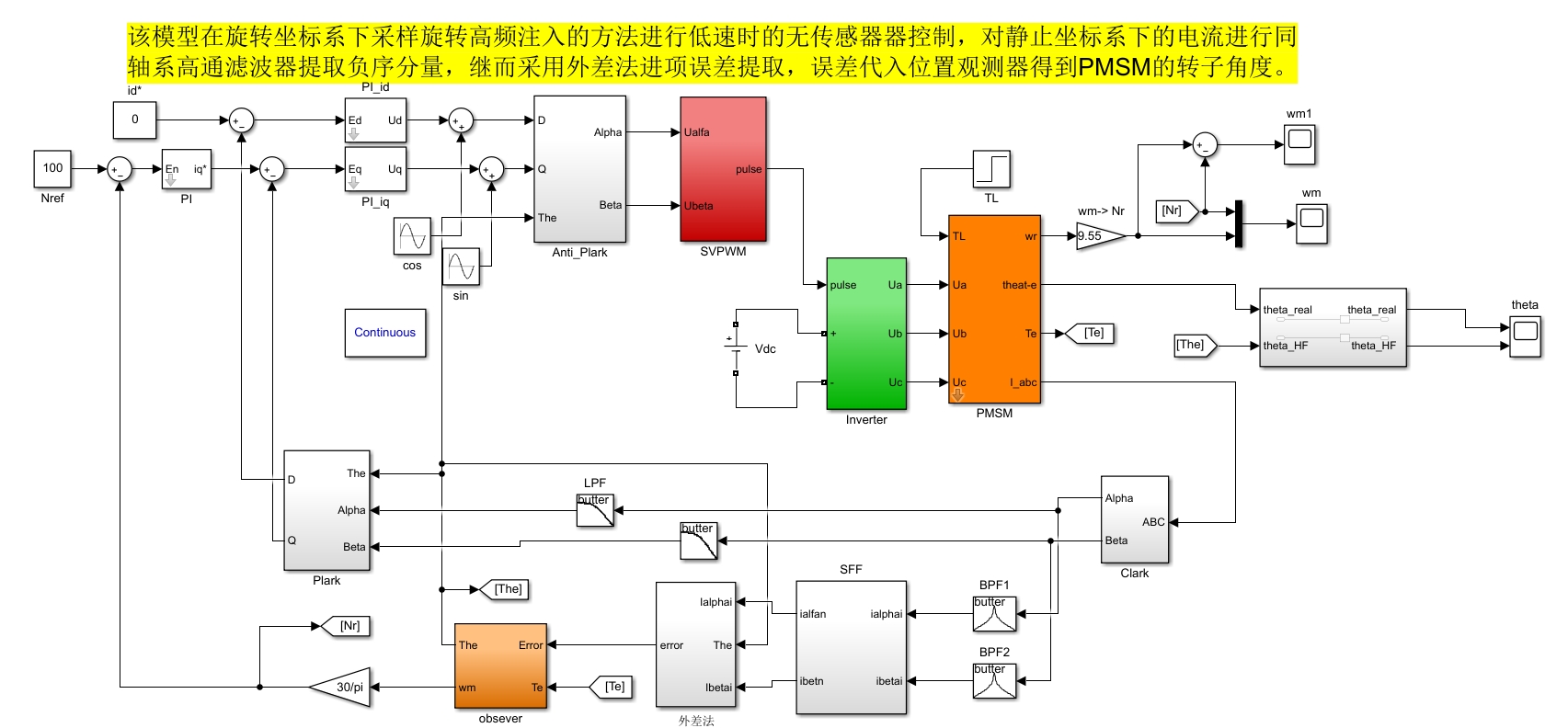
该模型在旋转坐标系下采样旋转高频注入的方法进行低速时的无传感器器控制,对静止坐标系下的电流进行同轴系高通滤波器提取负序分量,继而采用外差法进项误差提取,误差代入位置观测器得到PMSM的转子角度。
ID:53168676681793529

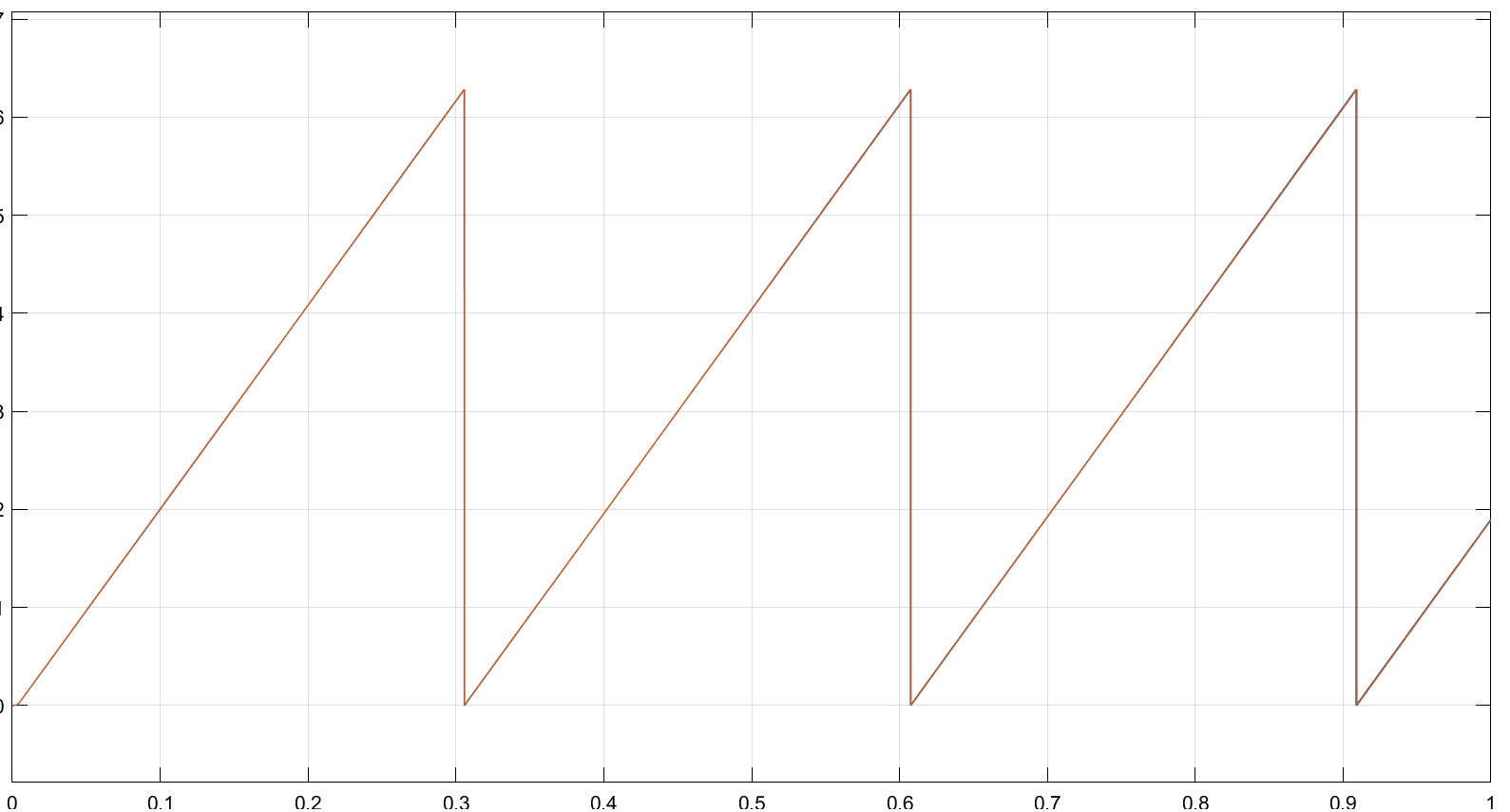
该模型在旋转坐标系下采样旋转高频注入的方法进行低速时的无传感器器控制,对静止坐标系下的电流进行同轴系高通滤波器提取负序分量,继而采用外差法进项误差提取,误差代入位置观测器得到PMSM的转子角度。
ID:53168676681793529