空间数据结构和碰撞检测
空间数据结构的组织通常是分层级的,这意味着,最高层包含一些子层,每个子层定义自己的空间体积,而这些空间又包含自己的子层,因此,该结构是嵌套的,具有递归性质,这个层次结构中的一些元素引用了几何体。使用层次结构的主要原因是,对不同类型的查询会更快,通常一个能够从O (n)提升到 O (log n)。也就是说,与其搜索所有n对象,我们只需要访问一小部分再执行操作,比如在一个给定的方向寻找最接近的对象。
虽然查找变快了,但是,空间数据结构的构造却可能需要花费时间。并且这取决于其内部几何形状的数量和所需的数据结构的质量,然而,该领域的重大进展大大减少了构造时间,在某些情况下甚至可以实时完成。使用lazy计算和增量更新,可以进一步减少构建时间。
参考:https://zhuanlan.zhihu.com/p/403554758?utm_id=0
>>SceneGraph(场景图):
>>层次包围盒(BVH)树:https://www.codetd.com/article/14793027(物体->包围盒->重叠时的分配问题)
练习6(games101):在之前的编程练习中,我们实现了基础的光线追踪算法,具体而言是光线传输、光线与三角形求交。我们采用了这样的方法寻找光线与场景的交点:遍历场景中的所有物体,判断光线是否与它相交。在场景中的物体数量不大时,该做法可以取得良好的结果,但当物体数量增多、模型变得更加复杂,该做法将会变得非常低效。因此,我们需要加速结构来加速求交过程。在本次练习中,我们重点关注物体划分算法 Bounding Volume Hierarchy (BVH)。
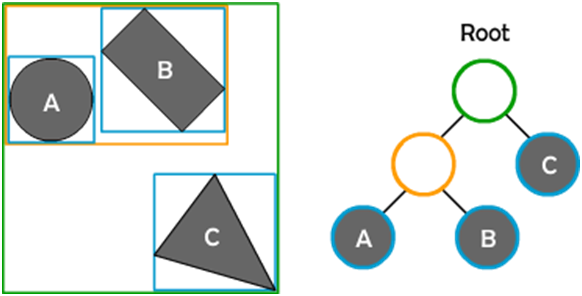
第一步:求每个物体的包围盒。
第二步:建立BVH树。从Root->(AB)+(C)->A-B+C。分别为一级节点-二级节点-三级节点。
根据每个多边形的面积大小来定义它属于哪个层级吗?
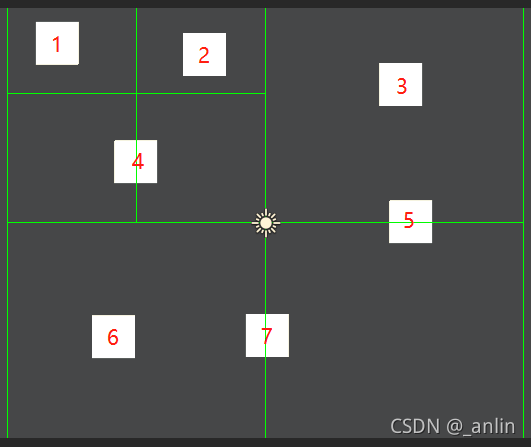
四叉树的缺点:上面提到的四叉树模型是个理想概念。实际问题中是不会有完美的点,对象都是有一定大小的,比如我们的方块。当方块与多个节点区域相交时怎么办?这里就有两种方案来处理这种情况。下面例子中最大对象数设置为2。(假如更极端一点:物体彼此紧挨着呢?根本无法分割。那么只能分一级,只有一个root。只有一个0级root节点了。)