14. 独立看门狗
一、什么是独立看门狗
独立看门狗(Independent watchdog,简称 IWDG)本质上是一个能产生 系统复位 的 定时器。该定时器是一个 12 位 的 递减计数器,当计数器的值减到 0 的时候,就会产生一个复位信号。如果在计数没减到 0 之前,重置计数器的值的话,那么就不会产生复位信号,这个动作我们称为 喂狗。独立看门狗的时钟由 独立的 RC 振荡器 提供,功能由 VDD 电压域供电,在停止模式和待机模式下仍然可以工作。
独立看门狗主要用于检测外界电磁干扰,或硬件异常导致跑飞问题。它主要应用于在一些需要高稳定性的产品中,并且对时间精度要求较低的场合。独立看门狗是异常处理的最后手段,不可依赖,应在程序设计时尽量避免异常的发生。
二、独立看门狗框图
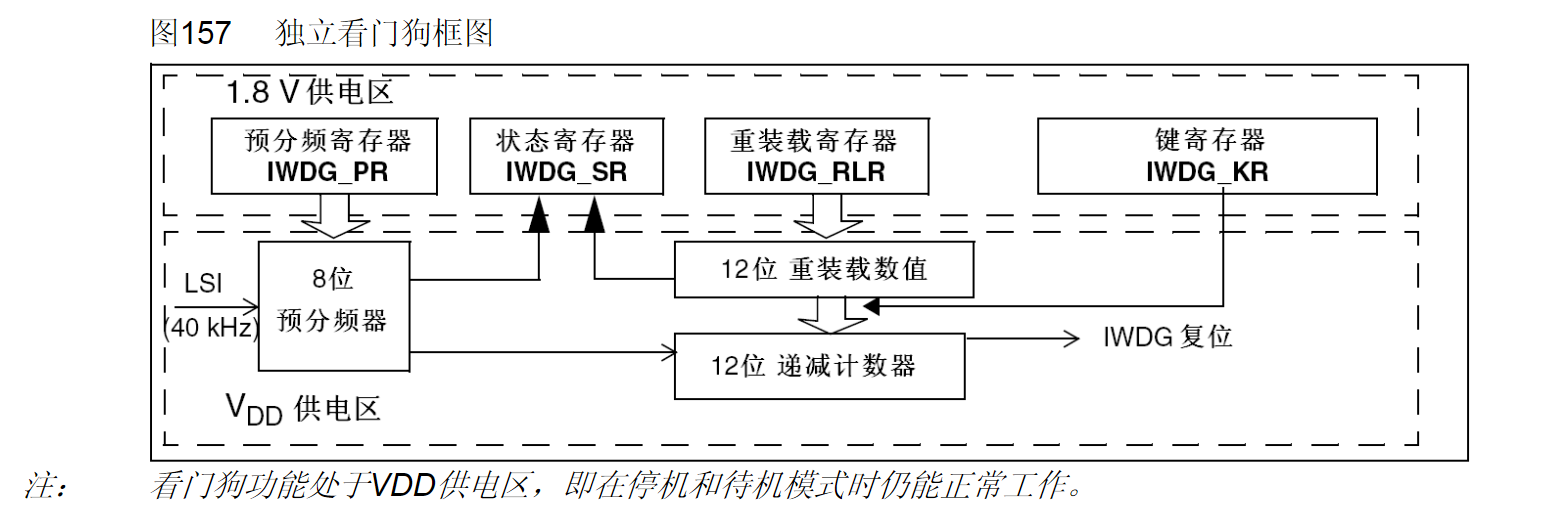
从 IWDG 框图整体认知就是,IWDG 有一个输入(时钟 LSI),经过一个 8位 的可编程预分频器提供时钟给一个 12位 递减计数器,满足条件就会输出一个复位信号。IWDG 内部输入/输出信号如下表:
| 信号名称 | 信号类型 | 说明 |
|---|---|---|
| LSI | 数字信号 | LSI 时钟 |
| IWDG 复位 | 数字信号 | IWDG 复位信号输出 |
STM32F103 的独立看门狗由内部专门的 40KHz 低速时钟(LSI)驱动,即使主时钟发生故障,它也仍然有效。这里需要注意独立看门狗的时钟是一个 内部 RC 时钟,所以并不是准确的 40Khz,而是在 30~60KHz 之间的一个可变化的时钟,只是我们在估算的时候,以 40KHz 的频率来计算,看门狗对时间的要求不是很精确,所以,时钟有些偏差,都是可以接受的。
启动 IWDG 后,LSI 时钟会自动开启;
LSI 时钟频率并不精确,F1 用 40KHz;
三、独立看门狗的工作原理
独立看门狗就是一个 12位 的 递减计数器,当计数器的值从某个值一直减到 0 的时候,系统就会产生一个复位信号,即 IWDG_RESET。如果在计数没减到 0 之前,刷新了计数器的值的话,那么就不会产生复位信号,这个动作就是我们经常说的喂狗。
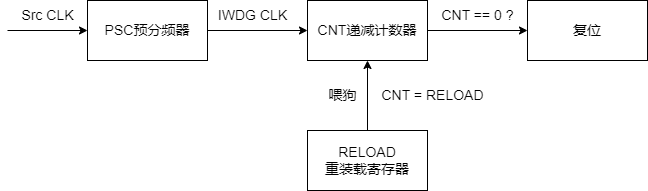
CPU 必须及时喂狗,否则系统复位重启!
四、独立看门狗寄存器介绍
4.1、键寄存器(IWDG_KR)
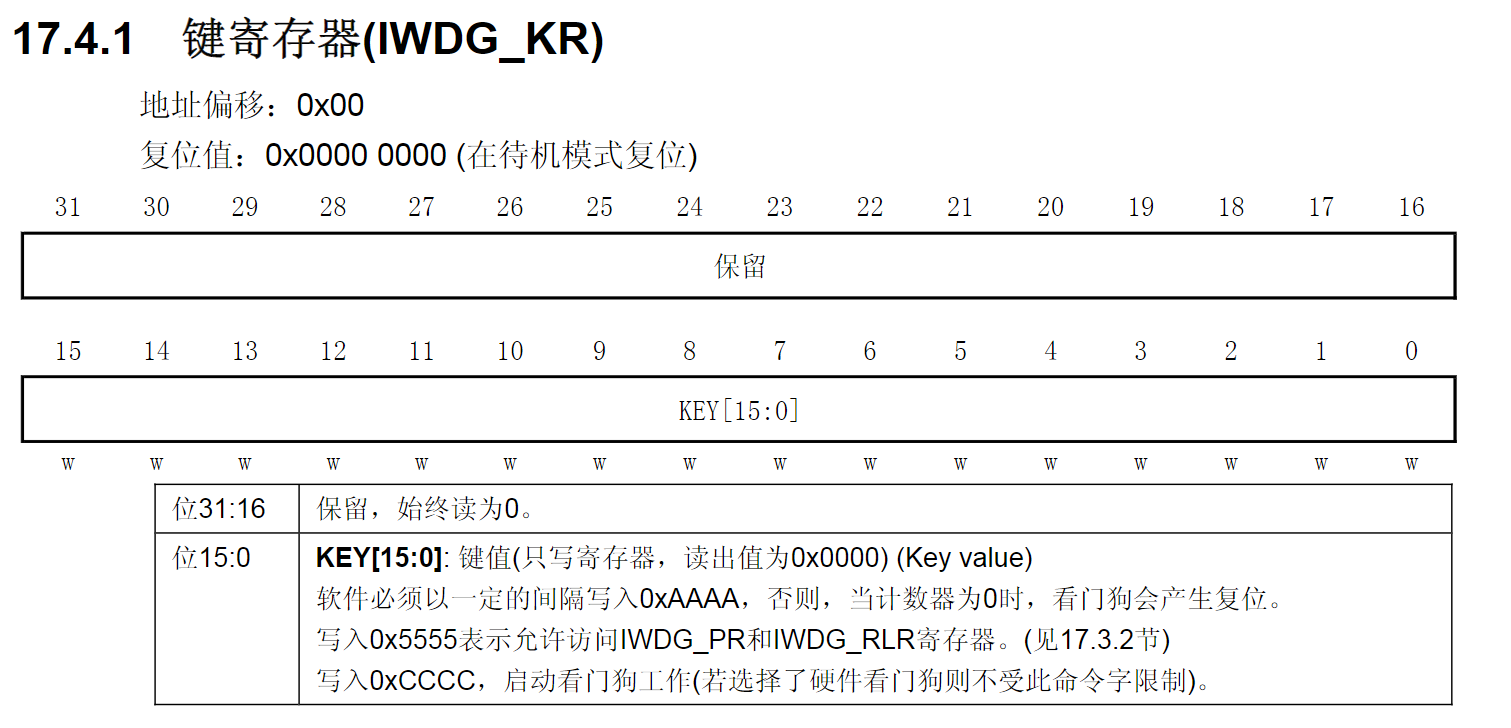
在键寄存器(IWDG_KR)中写入 0xCCCC,开始启用独立看门狗;此时计数器开始从其复位值 0xFFF 递减计数。当计数器计数到末尾 0x000 时,会产生一个复位信号(IWDG_RESET)。无论何时,只要键寄存器 IWDG_KR 中被写入 0xAAAA,IWDG_RLR 中的值就会被重新加载到计数器中从而避免产生看门狗复位。
IWDG_PR 和 IWDG_RLR 寄存器具有 写保护功能。要修改这两个寄存器的值,必须先向 IWDG_KR 寄存器中写入 0x5555。将其他值写入这个寄存器将会打乱操作顺序,寄存器将重新被保护。重装载操作(即写入 0xAAAA)也会启动写保护功能。
4.2、预分频寄存器(IWDG_PR)

该寄存器用来设置看门狗时钟(LSI)的分频系数,最低为 4,最高为 256,该寄存器是一个 32 位的寄存器,但是我们只用了 低 3 位,其他都是保留位。
4.3、重装载寄存器(IWDG_RLR)
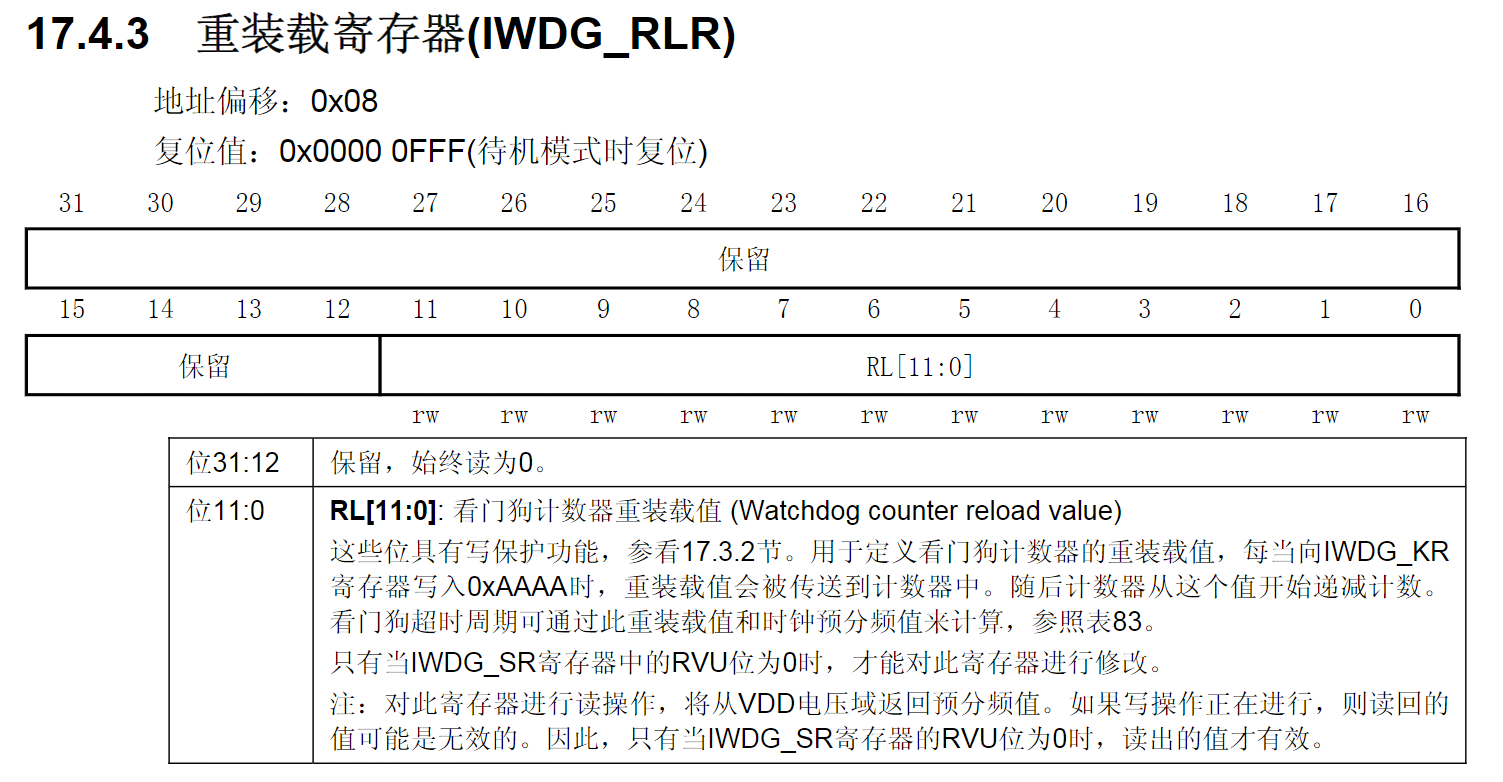
该寄存器用来保存重装载到计数器中的值。该寄存器也是一个 32 位寄存器,只有 低 12 位 是有效的。
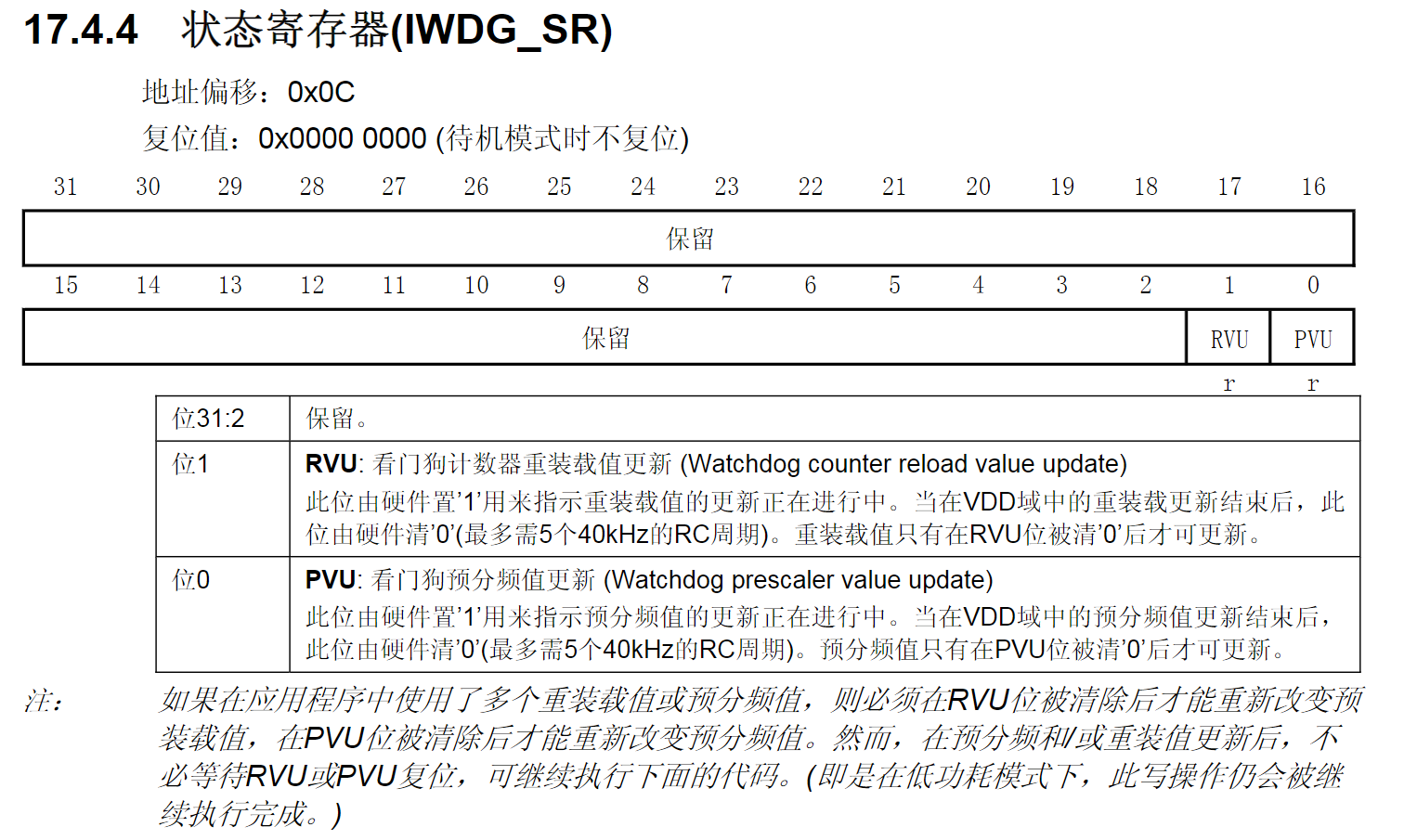
4.4、状态寄存器(IWDG_SR)
五、独立看门狗溢出时间计算
IWDG 溢出时间计算公式:\(T_{out} = \frac{psc * rlr}{f_{IWDG}}\)
其中,\(T_{out}\) 是看门狗溢出时间;\(f_{IWDG}\) 是看门狗的时钟源频率,一般为 40KHz;\(psc\) 是看门狗预分频系数;\(rlr\) 是看门狗重装载值;
寄存器设置分频系数的方法:\(psc = 4 * 2^{prer}\),\(prer\) 是 IWDG_PR 的值;即用寄存器设置 IWDG 溢出时间的计算公式为:\(T_{out} = \frac{(4 * 2 ^{prer}) * rlr}{f_{IWDG}}\)
独立看门狗超时时间 40KHz 的输入时钟(LSI):
| 预分频系数 | PR[2:0] | 最短时间(ms) RL[11:0] = 0x00 |
最长时间(ms) RL[11:0] = 0xFFF |
|---|---|---|---|
| /4 | 0 | 0.1 | 409.6 |
| /8 | 1 | 0.2 | 819.2 |
| /16 | 2 | 0.4 | 1638.4 |
| /32 | 3 | 0.8 | 3276.8 |
| /64 | 4 | 1.6 | 6553.6 |
| /128 | 5 | 3.2 | 13107.2 |
| /256 | (6 或 7) | 6.4 | 26214.4 |
这些时间是按照 40KHz 时钟给出。实际上,MCU 内部的 RC 频率会在 30KHz 到 60KHz 之间变化。此外,即使 RC 振荡器的频率是精确的,确切的时序仍然依赖于 APB接口时钟与 RC 振荡器时钟之间的相位差,因此总会有一个完整的 RC 周期是不确定的。通过对 LSI 进行校准可获得相对精确的看门狗超时时间。
六、独立看门狗配置步骤
IWDG 在 HAL 库中的驱动代码在 stm32f1xx_hal_iwdg.c 文件及其头文件 stm32f1xx_hal_iwdg.h 中。
6.1、IWDG工作参数初始化
【1】、HAL_IWDG_Init() 函数
HAL_IWDG_Init() 函数是 IWDG 的初始化函数,它主要用于 取消 PR/RLR 寄存器的写保护,设置 IWDG 预分频系数和重装载值,启动 IWDG,其声明如下:
/**
* @brief Initialize the IWDG according to the specified parameters in the
* IWDG_InitTypeDef and start watchdog. Before exiting function,
* watchdog is refreshed in order to have correct time base.
* @param hiwdg pointer to a IWDG_HandleTypeDef structure that contains
* the configuration information for the specified IWDG module.
* @retval HAL status
*/
HAL_StatusTypeDef HAL_IWDG_Init(IWDG_HandleTypeDef *hiwdg);
- 函数参数:
hiwdg 是 IWDG 句柄,IWDG_HandleTypeDef 结构体类型,定义如下:
/**
* @brief IWDG Handle Structure definition
*/
typedef struct
{
IWDG_TypeDef *Instance; /*!< Register base address */
IWDG_InitTypeDef Init; /*!< IWDG required parameters */
} IWDG_HandleTypeDef;
Instance:指向 IWDG 寄存器基地址。
#define IWDG ((IWDG_TypeDef *)IWDG_BASE)
Init:IWDG 初始化结构体,用于配置计数器的相关参数。IWDG_InitTypeDef 这个结构体类型定义如下:
/**
* @brief IWDG Init structure definition
*/
typedef struct
{
uint32_t Prescaler; /*!< Select the prescaler of the IWDG.
This parameter can be a value of @ref IWDG_Prescaler */
uint32_t Reload; /*!< Specifies the IWDG down-counter reload value.
This parameter must be a number between Min_Data = 0 and Max_Data = 0x0FFF */
} IWDG_InitTypeDef;
Prescaler:预分频系数,IWDG_PRESCALER_4 到 IWDG_PRESCALER_256。
/** @defgroup IWDG_Prescaler IWDG Prescaler
* @{
*/
#define IWDG_PRESCALER_4 0x00000000u /*!< IWDG prescaler set to 4 */
#define IWDG_PRESCALER_8 IWDG_PR_PR_0 /*!< IWDG prescaler set to 8 */
#define IWDG_PRESCALER_16 IWDG_PR_PR_1 /*!< IWDG prescaler set to 16 */
#define IWDG_PRESCALER_32 (IWDG_PR_PR_1 | IWDG_PR_PR_0) /*!< IWDG prescaler set to 32 */
#define IWDG_PRESCALER_64 IWDG_PR_PR_2 /*!< IWDG prescaler set to 64 */
#define IWDG_PRESCALER_128 (IWDG_PR_PR_2 | IWDG_PR_PR_0) /*!< IWDG prescaler set to 128 */
#define IWDG_PRESCALER_256 (IWDG_PR_PR_2 | IWDG_PR_PR_1) /*!< IWDG prescaler set to 256 */
Reload:重装载值,范围:0 到 0x0FFF。
- 函数返回值:
HAL_StatusTypeDef 枚举类型的值。
/**
* @brief HAL Status structures definition
*/
typedef enum
{
HAL_OK = 0x00U,
HAL_ERROR = 0x01U,
HAL_BUSY = 0x02U,
HAL_TIMEOUT = 0x03U
} HAL_StatusTypeDef;
6.2、喂狗
【1】、HAL_IWDG_Refresh() 函数
HAL_IWDG_Refresh() 函数是独立看门狗的喂狗函数,即写入 0xAAAA 到 IWDG_KR,用于把重装载寄存器的值重载到计数器中,喂狗,防止IWDG复位。其声明如下:
/**
* @brief Refresh the IWDG.
* @param hiwdg pointer to a IWDG_HandleTypeDef structure that contains
* the configuration information for the specified IWDG module.
* @retval HAL status
*/
HAL_StatusTypeDef HAL_IWDG_Refresh(IWDG_HandleTypeDef *hiwdg);
- 函数参数:
hiwdg 是 IWDG 句柄,IWDG_HandleTypeDef 结构体类型。这里,我们使用它的 Instance 成员,Instance 成员的取值为:
#define IWDG ((IWDG_TypeDef *)IWDG_BASE)
- 函数返回值:
HAL_StatusTypeDef 枚举类型的值。
/**
* @brief HAL Status structures definition
*/
typedef enum
{
HAL_OK = 0x00U,
HAL_ERROR = 0x01U,
HAL_BUSY = 0x02U,
HAL_TIMEOUT = 0x03U
} HAL_StatusTypeDef;
七、程序设计
IWDG 初始化函数:
IWDG_HandleTypeDef hiwdg;
void IWDG_Init(void)
{
hiwdg.Instance = IWDG; // 独立看门狗
hiwdg.Init.Prescaler = IWDG_PRESCALER_32; // 设置IWDG分频系数
hiwdg.Init.Reload = 1250; // 重装载值
hiwdg.Init.Window =IWDG_WINDOW_DISABLE; // 关闭窗口功能
HAL_IWDG_Init(&hiwdg); // 初始化IWDG
}
独立看门狗的时钟源频率为 40KHz,预分频系数设置为 32 分频,根据溢出时间公式:\(T_{out} = \frac{psc * rlr}{f_{IWDG}}\) 可知,当 IWDG 的重装载值为 1250 时,溢出时间约为1s;
喂狗函数:
HAL_IWDG_Refresh(&hiwdg); // 喂狗
配置 串口工作参数函数 和 串口底层初始化函数 请在 串口通信 篇章查看;
main() 函数:
int main(void)
{
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* Configure the system clock */
SystemClock_Config();
/* Initialize all configured peripherals */
IWDG_Init();
USART1_Init();
printf("独立看门狗开始工作!\r\n");
while (1)
{
HAL_Delay(1000);
HAL_IWDG_Refresh(&hiwdg);
printf("你已经进行了喂狗!\r\n");
}
}