sg90舵机+esp8266+点灯科技 小爱语音控制开关灯
网上做烂了好几年的项目 好久前就看到了 今天实现下
关于智能开关 什么通断器+凌动开关 什么绿米开关不买单火控制 什么断网就废买新中枢网关
这些都不实际 原有家庭电路 如果真加上这些是一笔不小的开销
真要实现 建议从装修房子 布线家庭电路前就考虑好 避免二次加工
这里适合自己房间或学校寝室使用哈
演示
开灯
关灯
一、材料
- esp8266 nodemcu ch340开发板 x1 13元
- 塑料sg90舵机 x1 6元
二、工具
- 焊笔 热熔胶
三、步骤
-
运行usb转串口通用驱动
https://wwkx.lanzouw.com/iuuod14mikxe 密码:ezxx -
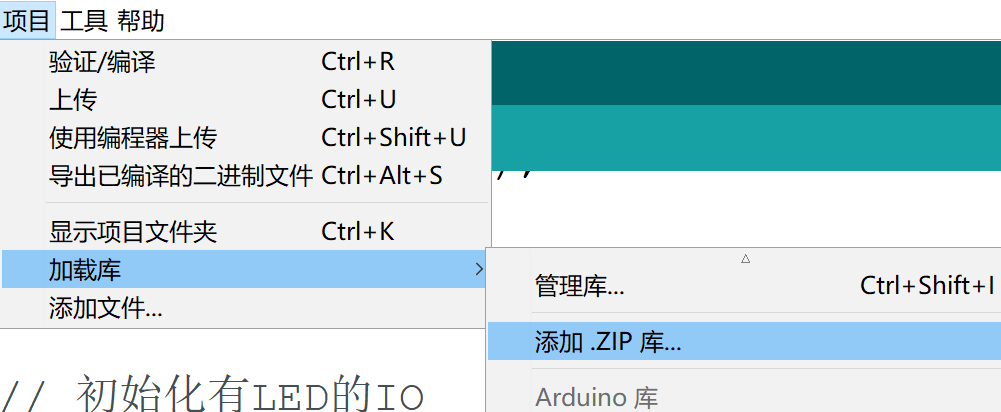
arduino添加点灯库
打开 https://www.diandeng.tech/dev 找到第一个c++下载完zip
选择库zip上传
-
arduino首选项添加
http://arduino.esp8266.com/stable/package_esp8266com_index.json
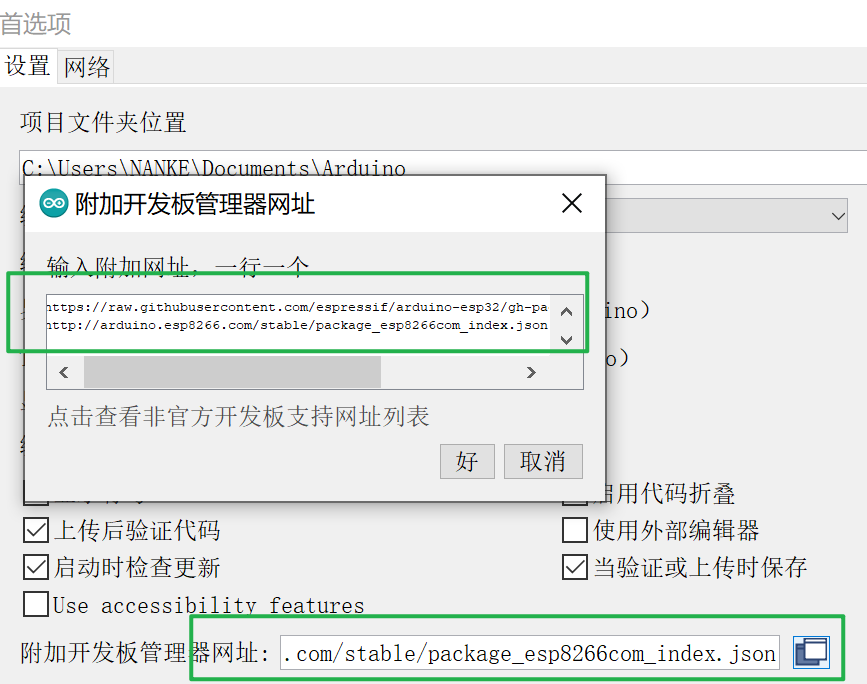
然后去开发板管理器选择esp8266 3.0.1下载安装
-
开发板选择如下

-
添加点灯key(点灯app新建网络设备默认的key) wifi名 wifi密码
-
主机连接开发板 选择对应com编译上传 设备管理器查看有无

四、代码
#include <ArduinoOTA.h>
#define BLINKER_WIFI
#define BLINKER_PRINT Serial
#define BLINKER_MIOT_LIGHT
#include <Blinker.h>
#include <Servo.h>
char auth[] = "你的点灯科技key";
char ssid[] = "你的wifi";
char pswd[] = "你的密码";
BlinkerButton Button1("ddl1"); //blinker按键键名
BlinkerButton Button2("ddl2"); //blinker按键键名
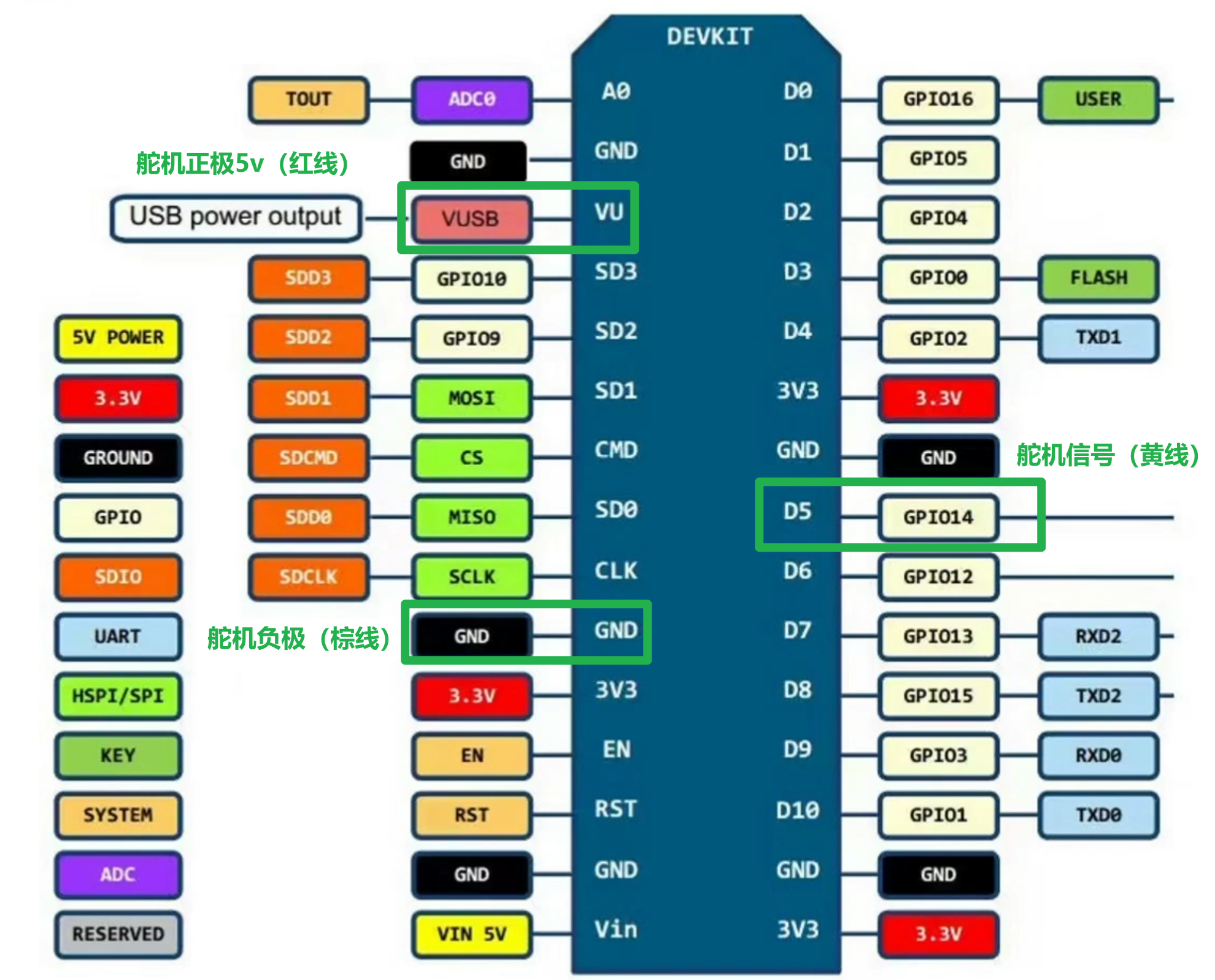
Servo servo_14; //舵机输出口 GIPO14
bool oState = false;
//按键1按下后执行该函数
void button1_callback(const String & state) {
BLINKER_LOG("get button state: ", state);
// digitalWrite(LED_BUILTIN, !digitalRead(LED_BUILTIN));
servo_14.write(45); //舵机旋转角度 具体参数需要结合自身情况修改
delay(1); //给一个小延时
delay(1000); //舵机动作后延时一会回到初始位置
servo_14.write(90); //设置该角度方便手动开关灯 就是开完灯舵机归位
}
//按键2按下执行该函数
void button2_callback(const String & state) {
BLINKER_LOG("get button state: ", state);
servo_14.write(135); //同上一样的思路
delay(1);
delay(1000);
servo_14.write(90);
}
//小爱电源回调函数
//里面同样设置舵机的动作
void miotPowerState(const String & state)
{
BLINKER_LOG("need set power state: ", state);
if (state == BLINKER_CMD_ON) {
// digitalWrite(LED_BUILTIN, HIGH);
servo_14.write(45);
delay(1);
delay(1000);
servo_14.write(90);
BlinkerMIOT.powerState("on");
BlinkerMIOT.print();
}
else if (state == BLINKER_CMD_OFF) {
// digitalWrite(LED_BUILTIN, LOW);
servo_14.write(135);
delay(1);
delay(1000);
servo_14.write(90);
BlinkerMIOT.powerState("off");
BlinkerMIOT.print();
}
}
void miotQuery(int32_t queryCode)
{
BLINKER_LOG("MIOT Query codes: ", queryCode);
switch (queryCode)
{
case BLINKER_CMD_QUERY_ALL_NUMBER :
BLINKER_LOG("MIOT Query All");
BlinkerMIOT.powerState(oState ? "on" : "off");
BlinkerMIOT.print();
break;
case BLINKER_CMD_QUERY_POWERSTATE_NUMBER :
BLINKER_LOG("MIOT Query Power State");
BlinkerMIOT.powerState(oState ? "on" : "off");
BlinkerMIOT.print();
break;
default :
BlinkerMIOT.powerState(oState ? "on" : "off");
BlinkerMIOT.print();
break;
}
}
void dataRead(const String & data)
{
BLINKER_LOG("Blinker readString: ", data);
Blinker.vibrate();
uint32_t BlinkerTime = millis();
Blinker.print(BlinkerTime);
Blinker.print("millis", BlinkerTime);
}
void setup()
{
Serial.begin(115200);
BLINKER_DEBUG.stream(Serial);
// 初始化有LED的IO
//这里初始话后没有调用板子自带的led
pinMode(LED_BUILTIN, OUTPUT);
servo_14.attach(14);
digitalWrite(LED_BUILTIN, HIGH);
// 初始化blinker
Blinker.begin(auth, ssid, pswd);
BlinkerMIOT.attachQuery(miotQuery);
Blinker.attachData(dataRead);
BlinkerMIOT.attachPowerState(miotPowerState);
Button1.attach(button1_callback);
Button2.attach(button2_callback);
}
void loop()
{
Blinker.run();
}
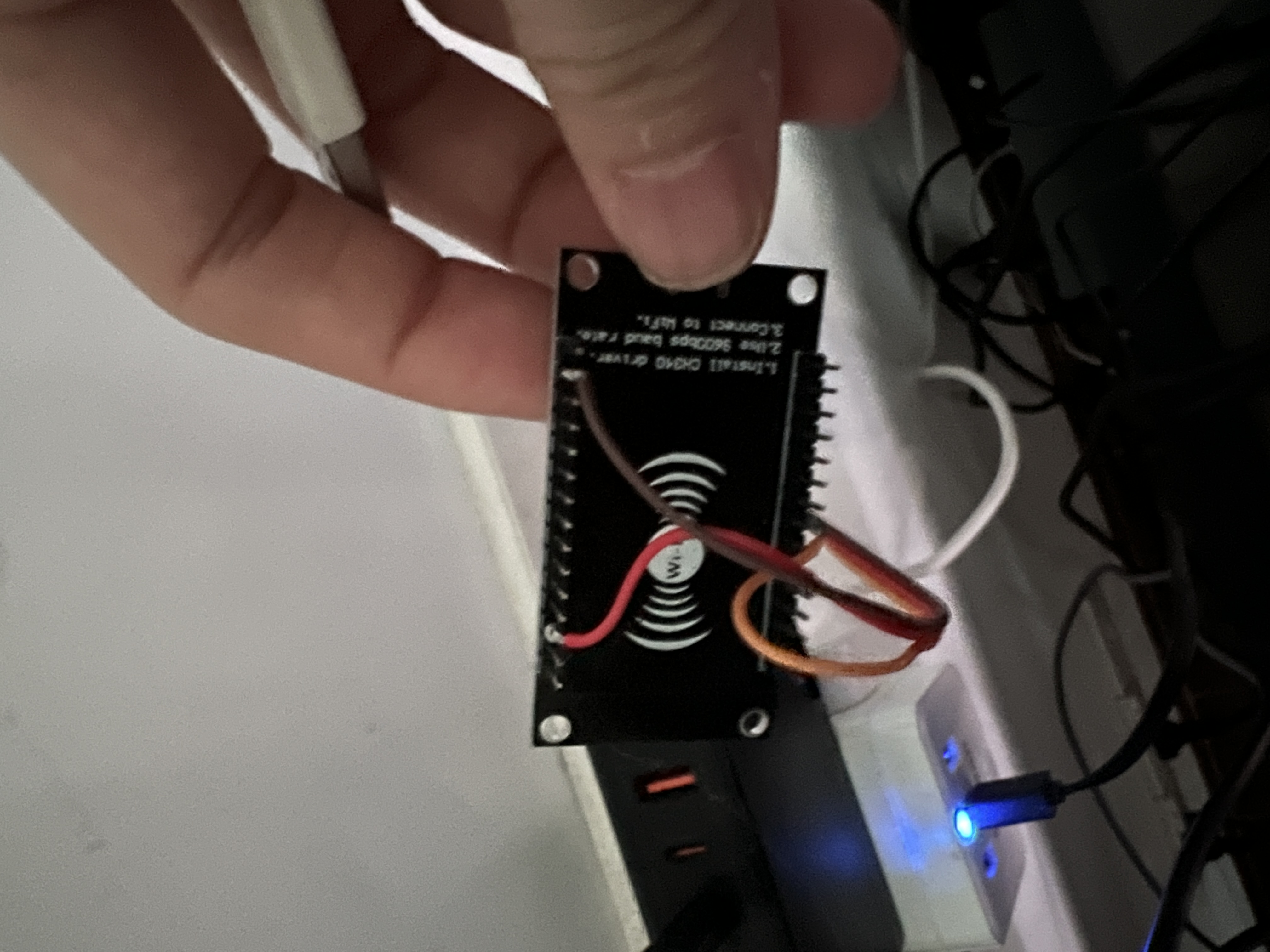
五、接线
信号线d5(舵机黄色)
正极(开发板5v)
负极(任意gnd)
六、参考
https://blog.csdn.net/qq_45664055/article/details/126986854